Có thể xác định J, K của các FF B và D bằng phương pháp MARCUS:

Bảng 5.24
Ta có ngay KD=KB=1
Dùng bảng Karnaugh xác định JD và JB

(H 5.30)
(H 5.31) là mạch đếm 10 thiết kế theo kiểu đếm 2x5 với mạch đếm 5 có được từ kết quả trên.

(H 5.31)
IC 7490 là IC đếm 10, có cấu tạo như mạch (H 5.31) thêm các ngã vào Reset 0 và Reset 9 có sơ đồ mạch (H 5.32)

(H 5.32)
Bảng 5.25 là bảng sự thật cho các ngã vào Reset

Bảng 5.25
Dùng IC 7490, có thể thực hiện một trong hai cách mắc:
Mạch đếm 2x5: Nối QA vào ngã vào B, xung đếm (CK) vào ngã vào A
Mạch đếm 5x2: Nối QD vào ngã vào A, xung đếm (CK) vào ngã vào B
Hai cách mắc cho kết quả số đếm khác nhau nhưng cùng một chu kỳ đếm 10. Tần số tín hiệu ở ngã ra sau cùng bằng 1/10 tần số xung CK (nhưng dạng tín hiệu ra khác nhau).
Dưới đây là hai bảng trạng thái cho hai trường hợp nói trên.

Bảng 5.26 : Đếm 2x5 Bảng 5.27 : Đếm 5x2
(H 5.33) cho thấy dạng sóng ở các ngã ra của hai mạch cùng đếm 10 nhưng hai kiểu đếm khác nhau:
- Kiểu đếm 2x5 cho tín hiệu ra ở QD không đối xứng
- Kiểu đếm 5x2 cho tín hiệu ra ở QA đối xứng

(H 5.33)
Mạch đếm vòng
Thực chất là mạch ghi dịch trong đó ta cho hồi tiếp từ một ngã ra nào đó về ngã vào để thực hiện một chu kỳ đếm. Tùy đường hồi tiếp mà ta có các chu kỳ đếm khác nhau
Sau đây ta khảo sát vài loại mạch đếm vòng phổ biến.
Hồi tiếp từ QD về JA và QD¯ size 12{ {overline {Q rSub { size 8{D} } }} } {} về KA

(H 5.34)
Đối với mạch này, sự đếm vòng chỉ thấy được khi có đặt trước ngã ra
- Đặt trước QA =1, ta được kết quả như bảng 5.28.

Bảng 5.28
Nếu đặt trước QA = QB = 1 ta có bảng 5.29

Bảng 5.29
Hồi tiếp từ QD__ size 12{ {Q rSub { size 8{D} } } cSup { size 8{"__"} } } {} về JA và QD về KA (H 5.35)

(H 5.35)
Mạch này còn có tên là mạch đếm Johnson. Mạch có một chu kỳ đếm mặc nhiên mà không cần đặt trước và nếu có đặt trước, mạch sẽ cho các chu kỳ khác nhau tùy vào tổ hợp đặt trước đó. Bảng 5.30 là chu kỳ đếm mặc nhiên.

Bảng 5.30
Hồi tiếp từ QD__ size 12{ {Q rSub { size 8{D} } } cSup { size 8{"__"} } } {} về JA và QC về KA (H 5.36)
(H 5.36)

Bảng 5.31
Vài thí dụ thiết kế mạch đếm
1. Dùng FF JK thiết kế mạch đếm 6, đồng bộ
Bảng trạng thái và hàm chuyển mạch đếm 6:
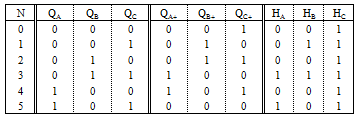
Bảng 5.32
HC = 1 ⇒ JC =KC = 1
Xác định JA, KA, JB, KB
Bảng Karnaugh cho hai hàm chuyển HA & HB
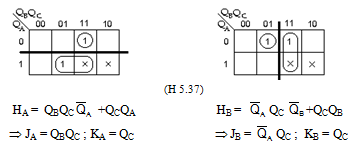
Mạch:

(H 5.38)
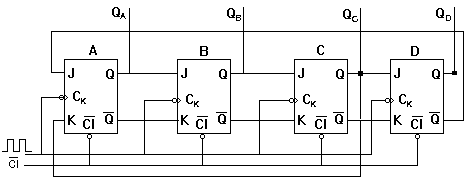
2. Thiết kế mạch đếm 7 không đồng bộ, dùng FF JK có ngã vào xung đồng hồ tác động bởi cạnh lên của CK.
Bảng trạng thái

Bảng 5.33
Nhận xét bảng trạng thái ta thấy mỗi lần QB thay đổi từ 1 xuống 0 thì QA đổi trạng thái, mà FF có xung đồng hồ tác động bởi cạnh lên nên ta có thể lấy làm xung đồng hồ cho FFA và JA=KA=1.
FF B và FFC sẽ dùng xung đồng hồ hệ thống, dùng phương pháp MARCUS để xác định J & K của các FF này.
Ta thấy ngay KC=1
