Tổng quan
Mục tiêu
- Sinh viên cần hiểu được các phép biến đổi cơ bản trong không gian hai chiều. Nắm vững công thức tổng quát của phép biến đổi Affine, từ đó suy ra các phép tịnh tiến, quay...
- Có khả năng lập trình tạo một hình ảnh động trên máy tính
Kiến thức cơ bản cần thiết
Kiến thức toán học : hiểu biết về ma trận, định thức. Các phép toán trên ma trận.
Tài liệu tham khảo
Computer Graphics . Donald Hearn, M. Pauline Baker. Prentice-Hall, Inc.,Englewood Cliffs, New Jersey , 1986 (chapters 5, 106-122).
Nội dung cốt lõi
Bản chất của phép biến đổi hình học là thay đổi các mô tả về tọa độ của đối tượng như thay đổi về hướng, kích thước, hình dạng. Do đó, chương này trình bày các phép biến đổi như tịnh tiến, tỉ lệ, phép quay, đối xứng, biến dạng.
Phép tịnh tiến (translation)
Có hai quan điểm về phép biến đổi hình học, đó là :
- Biến đổi đối tượng : thay đổi tọa độ của các điểm mô tả đối tượng theo một qui tắc nào đó.
- Biến đổi hệ tọa độ : Tạo ra một hệ tọa độ mới và tất cả các điểm mô tả đối tượng sẽ được chuyển về hệ tọa độ mới.
Các phép biến đổi hình học cơ sở là : tịnh tiến, quay, biến đổi tỉ lệ.
Phép biến đổi Affine hai chiều (gọi tắc là phép biến đổi) là một ánh xạ T biến đổi điểm P(Px, Py) thành điểm Q(Qx, Qy) theo hệ phương trình sau:
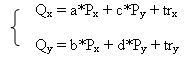
Hay
(Qx, Qy) = (Px, Py). + (trx, try)
⇒ Q = P.M + tr
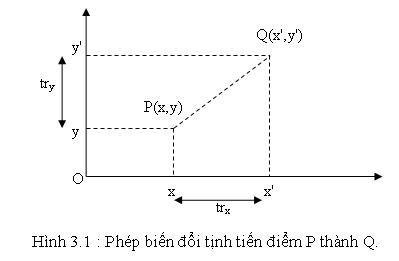
Dùng để dịch chuyển đối tượng từ vị trì này sang vị trí khác.
Nếu gọi trx và try lần lượt là độ dời theo trục hoành và trục tung thì tọa độ điểm mới Q(x', y') sau khi tịnh tiến điểm P(x,y) sẽ là :
x' = x + trx
y' = y + try
(trx, try) được gọi là vector tịnh tiến hay vector độ dời (xem hình 3.1).
Hay Q = P*M +tr
M= , tr = (trx, try)
Phép biến đổi tỷ lệ
Phép biến đổi tỉ lệ làm thay đổi kích thước đối tượng. Để co hay giãn tọa độ của một điểm P(x,y) theo trục hoành và trục tung lần lượt là Sx và Sy (gọi là các hệ số tỉ lệ), ta nhân Sx và Sy lần lượt cho các tọa độ của P.
x' = x.Sx
y' = y.Sy
- Khi các giá trị Sx , Sy nhỏ hơn 1, phép biển đổi sẽ thu nhỏ đối tượng. Ngược lại, khi các giá trị này lớn hơn 1, phép biến đổi sẽ phóng lớn đối tượng.
- Khi Sx = Sy , người ta gọi đó là phép đồng dạng (uniform scaling). Đây là phép biến đổi bảo toàn tính cân xứng của đối tượng. Ta gọi là phép phóng đại nếu |S|>1 và là phép thu nhỏ nếu |S|<1.
- Nếu hai hệ số tỉ lệ khác nhau thì ta gọi là phép không đồng dạng. Trong trường hợp hoặc Sx hoặc Sy có giá trị 1, ta gọi đó là phép căng (strain).
Phép quay
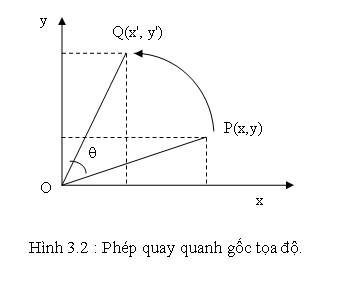
Phép quay làm thay đổi hướng của đối tượng. Một phép quay đòi hỏi phải có tâm quay, góc quay. Góc quay dương thường được qui ước là chiếu ngược chiều kim đồng hồ.
Phép quay quanh gốc tọa độ
Ta có công thức biến đổi của phép quay điểm P(x,y) quanh gốc tọa độ góc θ (xem hình 3.2):
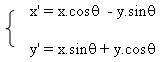
Hay Q = P*M
với M =
Phép quay quanh một điểm bất kỳ
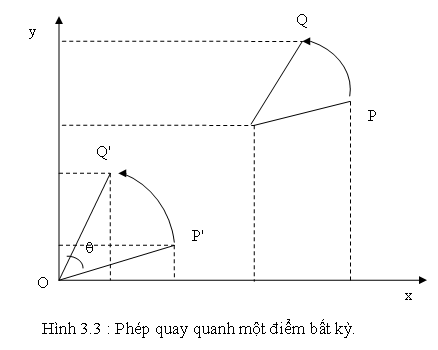
Xét điểm P(P.x,P.y) quay quanh điểm V(V.x, V.y) một góc θ đến điểm Q(Q.x,Q.y). Ta có thể xem phép quay quanh tâm V được kết hợp từ phép các biến đổi cơ bản sau:
- Phép tịnh tiến (-V.x, -V.y) để dịch chuyển tâm quay về gốc tọa độ
- Quay quanh gốc tọa độ O một góc θ
- Phép tịnh tiến (+V.x, +V.y) để đưa tâm quay về vị trí ban đầu
Ta cần xác định tọa độ của điểm Q (xem hình 3.3).
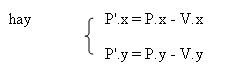
- Từ phép tịnh tiến (-V.x,-V.y) biến đổi điểm P thành P' ta được:
P' = P + V
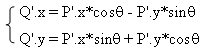
- Phép quay quanh gốc tọa độ biến đổi điểm P' thành Q'
Q' = P'.M
- Phép tịnh tiến (+V.x, +V.y) biến đổi điểm Q' thành Q ta được
Q = Q' + V
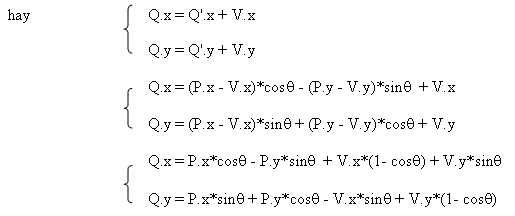
Với
Phép đối xứng
Phép đối xứng trục có thể xem là phép quay quanh trục đối xứng mõt góc 1800.
Phương trình ban đầu :
Hay
(Q.x, Q.y) = (P.x, P.y). + (trx, try)
Trục đối xứng là trục hoành :
M =
Ta có :
Tương tự trục đối xứng là trục tung :
Ta có :
M =
Phép biến dạng
Phép biến dạng biến đổi làm thay đổi, méo mó hình dạng của các đối tượng.
- Biến dạng theo phương trục x sẽ làm thay đổi hoành độ còn tung độ giữ nguyên.
Ví dụ : biến đổi điểm P(P.x, P.y) thành điểm Q(Q.x, Q.y) theo phương trục x là phép biến đổi được biểu diễn bởi phương trình sau :
M =
- Biến dạng theo phương trục y sẽ làm thay đổi tung độ còn hoành độ giữ nguyên.
M =
Phép biến đổi Affine ngược ( The inverse of an Affine transformation)
Phép biến đổi ngược dùng để undo một phép biến đổi đã thực hiện.
Gọi Q là ảnh của P qua phép biến đổi T có ma trận biến đổi M là : P.M.
Phép biến đổi ngược T -1 sẽ có ma trận biến đổi là M -1 là ma trận nghịch đảo của ma trận M.
Nếu M = thì M -1 =
Ta có :
Phép tịnh tiến : M = thì M -1 =
Phép quay : M = thì M -1 =
Phép biến đổi tỉ lệ : M = thì M -1 =
Phép biến dạng : M = thì M -1 =
Một số tính chất của phép biến đổi affine
- Bảo toàn đường thẳng : ảnh của đường thẳng qua phép biến đổi affine là đường thẳng.
Ví dụ : Để biến đổi một đoạn thẳng qua hai điểm A và B, chỉ cần thực hiện phép biến đổi cho A và B. Do vậy, để biến đổi một đa giác, chỉ cần thực hiện phép biến đổi đối với các đỉnh của đa giác.
- Bảo toàn tính song song : ảnh của hai đường thẳng song song là song song.
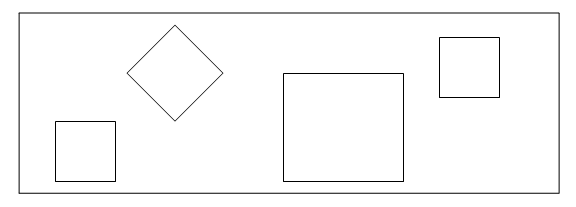
Ví dụ : ảnh của hình vuông, hình chữ nhật, hình bình hành, hình thoi sau phép biến đổi là hình bình hành.
- Bảo toàn tỉ lệ khoảng cách : Nếu điểm M chia đoạn AB theo tỉ số m thì ảnh của M là M' cũng chia đoạn AB theo tỉ số m.
Ví dụ : Trong hình vuông, các đường chéo cắt nhau tại trung điểm của mỗi đường nên các đường chéo của bất kỳ hình bình hành nào cũng cắy nhau tại trung điểm của mỗi đường.
Trong tam giác đều, giao điểm của 3 đường trung tuyến chia mỗi đường theo tỉ số 1:2. Do ảnh của tam giác đều qua phép biến đổi affine la một tam giác nên giao điểm của các đường trung tuyến trong một tam giác cũng sẽ chia chúng theo tỉ lệ 1:2.
Hệ tọa độ thuần nhất
Tọa độ thuần nhất của một điểm trên mặt phẳng được biểu diễn bằng bộ ba số tỉ lệ (xh , yh , h) không đồng thời bằng 0 và liên hệ với các tọa độ (x, y) của điểm đó bởi công thức :
x = và y =
Nếu một điểm có tọa độ thuần nhất là (x,y,z) thì nó cũng có tọa độ thuần nhất là (h.x, h.y, h.z) trong đó h là số thực khác 0 bất kỳ.
Một điểm P(x,y) sẽ được biểu diễn dưới dạng tọa độ thuần nhất là (x,y,1).
Trong hệ tọa độ thuần nhất các ma trận của phép biến đổi được biểu diễn như sau :
Phép tịnh tiến : M =
Phép biến đổi tỉ lệ : M =
Phép quay : M =
Thuận lợi của hệ tọa độ thuần nhất là khi ta kết hợp hai hay nhiều phép biến đổi affine thi ma trận hợp của nhiều phép biến đổi được tính bằng cách nhân các ma trận của các phép biến đổi thành phần.
Kết hợp các phép biến đổi (composing transformation)
Quá trình áp dụng các phép biến đổi liên tiếp để tạo nên một phép biến đổi tổng thể được gọi là sự kết hợp các phép biến đổi.
Kết hợp các phép tịnh tiến
Nếu ta thực hiện phép tịnh tiến lên điểm P được điểm P', rồi lại thực hiện tiếp một phép tịnh tiến khác lên P' được điểm Q. Như vậy, điểm Q là ảnh của phép biến đổi kết hợp hai phép tịnh tiến liên tiếp.
M = * =
Vậy kết hợp hai phép tịnh tiến là một phép tịnh tiến. Từ đó, ta có kết hợp của nhiều phép tịnh tiến là một phép tịnh tiến.
Kết hợp các phép biến đổi tỉ lệ
Tương tự như phép tịnh tiến, ta có tọa độ điểm Q là điểm có được sau hai phép tịnh tiến M1(Sx1, Sy1 ), M2 (Sx2, Sy2 )là :
Q.x = P.x* Sx1* Sx2
Q.y = P.y* Sy1* Sy2
M = * =
- Kết hợp các phép quay
Tương tự, ta có tọa độ điểm Q là điểm kết quả sau khi kết hợp hai phép quay quanh gốc tọa độ MR1(θ1) và MR2(θ2) là :
Q.x = P.x*cos(θ1+θ2) - P.y*sin (θ1+θ2)
Q.y = P.x*sin(θ1+θ2) + P.y*cos(θ1+θ2)
M = * =
Tổng kết chương
Sinh viên cần nắm bắt được vấn đề cơ bản của phép biến đổi 2 chiều là phép biến đổi Affine biến đổi điểm P(P.x, P.y) thành điểm Q(Q.x, Q.y) là hàm tuyến tính có dạng :
(Q.x, Q.y) = (P.x, P.y). + (trx, try)
⇒ Q = P.M + tr
Từ công thức cơ bản này ta suy ra được các công thức biến đổi khác.
Bài tập chương
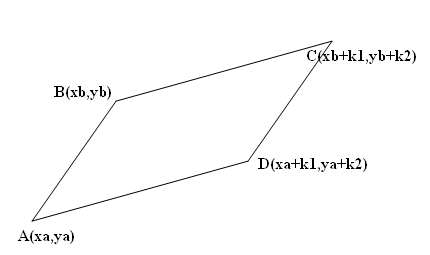
- Vẽ một hình bình hành bằng cách sử dụng phép tịnh tiến. (Vẽ đoạn thẳng AB, sau đó tịnh tiến AB thành đoạn thẳng CD//AB, vẽ AD, Tịnh tiến AD thành BC (xem hình vẽ).
- Viết chương trình vẽ một hình vuông ABCD (xem hình vẽ).
- Tịnh tiến hình vuông đó đến vị trí khác.
- Phóng to hình vuông ABCD.
- Biến dạng hình vuông thành hình thoi.
- Vẽ một elip, sau đó vẽ thêm 3 elip khác có cùng tâm với elip đã cho, có độ dãn ở trục Ox là K và Oy là 1.
- Vẽ một elip nghiêng một góc G độ có các trục không song song với các trục tọa độ.
- Vẽ một bông hoa bằng cách vẽ các elip nghiêng một góc G độ với các màu khác nhau. Vẽ đến khi nào ấn phím bất kỳ thì ngưng.
- Viết chương trình mô phỏng sự chuyển động của elip bằng cách cho elip này quay quanh tâm của nó.
- Viết chương trình mô phỏng sự chuyển động của trái đất quay quanh mặt trời.
- Viết chương trình vẽ một đường tròn tâm O bán kính R. Vẽ một đường kính AB. Quay đường kính này quanh tâm đường tròn.
- Viết chương trình vẽ đoạn thẳng AB.