Vector spaces are the principal object of study in linear algebra. A vector space is always defined with respect to a field of scalars.
Fields
A field is a set equipped with two operations, addition and mulitplication, and containing two special members 0 and 1 (), such that for all
-
- there exists such that
-
- there exists such that
- is an abelian group under addition
- is an abelian group under multiplication
- multiplication distributes over addition
Examples
ℚ, ℝ, ℂ
Vector Spaces
Let be a field, and a set. We say is a vector space over if there exist two operations, defined for all , and :
- vector addition: (, ) →
- scalar multiplication: (,) →
-
- there exists such that
-
- is an abelian group under plus
- Natural properties of scalar multiplication
Examples
- is a vector space over ℝ
- is a vector space over ℂ
- is a vector space over ℝ
- is not a vector space over ℂ
Euclidean Space
Throughout this course we will think of a signal as a vector The samples could be samples from a finite duration, continuous time signal, for example.
A signal will belong to one of two vector spaces:
Real Euclidean space
(over ℝ)
Complex Euclidean space
(over ℂ)
Subspaces
Let be a vector space over .
A subset is called a subspace of if is a vector space over in its own right.
, , .
Are there other subspaces?
is a subspace if and only if for all and and for all and ,
Linear Independence
Let .
We say that these vectors are linearly dependent if there exist scalars such that
If [link] only holds for the case , we say that the vectors are linearly independent.
so these vectors are linearly dependent in .
Spanning Sets
Consider the subset . Define the span of
Fact: is a subspace of .
, , , , ⇒ .
Aside
If is infinite, the notions of linear independence and span are easily generalized:
We say is linearly independent if, for every finite collection , ( arbitrary) we have The span of is
Bases
A set is called a basis for over if and only if
- is linearly independent
= (real or complex) Euclidean space, or . where the 1 is in the position.
over ℂ. which is the DFT basis. where .
Key Fact
If is a basis for , then every can be written uniquely (up to order of terms) in the form where and .
Other Facts
- If is a linearly independent set, then can be extended to a basis.
- If , then contains a basis.
Dimension
Let be a vector space with basis . The dimension of , denoted , is the cardinality of .
Every vector space has a basis.
Every basis for a vector space has the same cardinality.
is well-defined.
If , we say is finite dimensional.
Examples
| vector space | field of scalars | dimension |
Every subspace is a vector space, and therefore has its own dimension.
Suppose is a linearly independent set. Then
- If is a subspace of , then .
- If , then .
Direct Sums
Let be a vector space, and let and be subspaces.
We say is the direct sum of and , written , if and only if for every , there exist unique and such that .
If , then is called a complement of .
If , and , and , then is odd and even, which implies and .
Facts
- Every subspace has a complement
- if and only if
- If , and , then
Proofs
Invoke a basis.
Norms
Let be a vector space over . A norm is a mapping , denoted by , such that forall , , and
- if
Examples
Euclidean norms:
: :
Induced Metric
Every norm induces a metric on which leads to a notion of "distance" between vectors.
Inner products
Let be a vector space over , or . An inner product is a mapping , denoted , such that
- , and
Examples
over ℝ:
over ℂ:
If , then is called the "Hermitian," or "conjugate transpose" of .
Triangle Inequality
If we define , then Hence, every inner product induces a norm.
Cauchy-Schwarz Inequality
For all , , In inner product spaces, we have a notion of the angle between two vectors:
Orthogonality
and are orthogonal if Notation: .
If in addition , we say and are orthonormal.
In an orthogonal (orthonormal) set, each pair of vectors is orthogonal (orthonormal).
Orthonormal Bases
An Orthonormal basis is a basis such that
The standard basis for or
The normalized DFT basis
Expansion Coefficients
If the representation of with respect to is then
Gram-Schmidt
Every inner product space has an orthonormal basis. Any (countable) basis can be made orthogonal by the Gram-Schmidt orthogonalization process.
Orthogonal Compliments
Let be a subspace. The orthogonal compliment is is easily seen to be a subspace.
If
, then
.
Linear Transformations
Loosely speaking, a linear transformation is a mapping from one vector space to another that preserves vector space operations.
More precisely, let , be vector spaces over the same field . A linear transformation is a mapping such that for all , and , .
In this class we will be concerned with linear transformations between (real or complex) Euclidean spaces, or subspaces thereof.
Image
Nullspace
Also known as the kernel:
Both the image and the nullspace are easily seen to be subspaces.
Rank
Nullity
Rank plus nullity theorem
Matrices
Every linear transformation
has a matrix
representation. If
,
or , then
is represented by an
matrix
where
and
is the
standard basis vector.
Column span
Duality
If , then
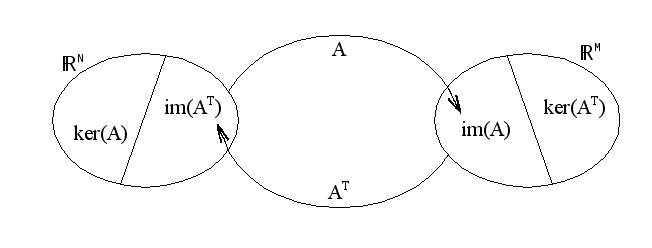
If , then
Inverses
The linear transformation/matrix is invertible if and only if there exists a matrix such that (identity).
Only square matrices
can be invertible.
Let
be linear,
or . The
following are equivalent:
If (or in the complex case), we say is orthogonal (or unitary).