Định nghĩa chuyển động cơ học :
Chuyển động cơ học là sự chuyển dời vị trí trong không gian của các vật hay là sự chuyển động của một bộ phận này so với bộ phận khác của cùng một vật.
Ví dụ : chuyển động của các thiên thể trên bầu trời, chuyển động của xe ôtô trên đường, chuyển động của con thoi trong một máy dệt, chuyển động của rôto đối với stato trong một động cơ điện …
Nói một vật chuyển động hay đứng yên thì điều đó chỉ có tính chất tương đối vì điều này còn phụ thuộc vào người quan sát đứng ở vị trí nào. Thật vậy, nếu ta đứng bên đường quan sát thì ta thấy cái cây đứng yên, nhưng nếu ta ngồi trên một cái ôtô đang chuyển động thì ta thấy cái cây chuyển động. Điều tương tự xảy ra nếu ta nếu ta quan sát các ngôi sao trên bầu trời : ta thấy quả đất đứng yên còn mặt trời, mặt trăng và các ngôi sao đều quay quanh trái đất.
Tóm lại, chuyển động có tính chất tương đối và phụ thuộc vào vị trí mà ở đó ta đứng quan sát chuyển động. Thực ra trong vũ trụ không có vật nào đứng yên một cách tuyệt đối, mọi vật đều chuyển động không ngừng. Vì vậy, khi nói rằng một vật chuyển động thì ta phải nói rõ vật đó là chuyển độngđối với vật nào mà ta qui ước là đứng yên.
Hệ qui chiếu :
Vật hay hệ vật mà ta qui ước là đứng yên khi nghiên cứu chuyển động của một vật khác được gọi là hệ qui chiếu.
Cần lưu ý rằng, cùng một chuyển động nhưng sẽ xảy ra khác nhau trong các hệ qui chiếu khác nhau. Ví dụ xét chuyển động của một điểm M nằm trên vành xe đang chạy, nếu ta chọn hệ qui chiếu là xe đạp thì ta thấy chuyển động của điểm đó là chuyển động tròn đều, còn nếu hệ qui chiếu là mặt đường thì điểm M sẽ tham gia một chuyển động phức tạp là tổng hợp của hai chuyển động : chuyển động tròn đối với xe và chuyển động thẳng của xe đối với mặt đường.
Khi xét một chuyển động cụ thể người ta thường chọn hệ qui chiếu sao cho chuyển động được mô tả một cách đơn giản nhất.
Để mô tả các chuyển động trên mặt quả đất, ta thường chọn hệ qui chiếu là quả đất hay các vật gắn liền với quả đất. Ví dụ khi nghiên cứu chuyển động của quả đạn pháo thì ta chọn hệ qui chiếu là mặt đất hay là chính khẩu pháo.
Khi nghiên cứu chuyển động của các hành tinh thì ở hệ qui chiếu quả đất ta thấy chuyển động của các hành tinh phức tạp đến nỗi trong nhiều thế kỷ các nhà thiên văn không thể nào tìm được các qui luật chuyển động của các hành tinh. Mãi đến đầu thế kỷ 17, nhờ sử dụng hệ qui chiếu mặt trời (hệ qui chiếu Copernic), Kepler mới tìm được qui luật đúng đắn mô tả chuyển động của các hành tinh trong hệ mặt trời. Cần chú ý rằng chuyển động tuy được mô tả khác nhau trong các hệ qui chiếu khác nhau nhưng nếu biết chuyển động tương đối của các hệ qui chiếu đối với nhau thì có thể từ cách mô tả chuyển động trong hệ qui chiếu này có thể suy ra cách mô tả chuyển động trong hệ qui chiếu kia. Ví dụ, biết chuyển động tròn đều của một điểm trên vành xe đạp và biết chuyển động của xe đạp đối với mặt đường ta có thể mô tả chuyển động của điểm trên vành xe đối với mặt đường.
Hệ tọa độ :
Vì rằng chuyển động xảy ra trong không gian và trong thời gian nên để mô tả chuyển động thì trước tiên ta phải tìm cách định vị vật trong không gian. Muốn vậy, ta phải đưa thêm vào hệ qui chiếu một hệ tọa độ. Trong vật lý người ta sử dụng nhiều hệ tọa độ khác nhau. Ở đây, ta sẽ giới thiệu hai hệ tọa độ thường hay gặp.
Hệ tọa độ Đề-các (Descartes) :
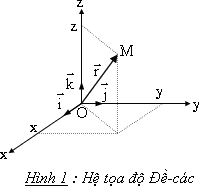
Hệ tọa độ Đề-các gồm ba trục Ox, Oy, Oz tương ứng vuông góc với nhau từng đôi một, chúng tạo thành một tam diện thuận. Điểm O gọi là gốc tọa độ. Vị trí của một điểm M bất kỳ được hoàn toàn xác định bởi bán kính vectơ, hay bởi tập hợp của ba số (x,y,z) trong đó x,y,z là hình chiếu của điểm mút M của vectơ = Olên các trục tương ứng Ox, Oy, Oz được gọi là ba tọa độ của điểm M trong hệ tọa độ Đề-các.
Nếu gọi là các vectơ đơn vị hướng theo các trục Ox, Oy, Oz thì ta có thể viết :
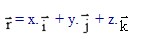
Hệ tọa độ cầu :
Trong hệ tọa độ cầu,vị trí của một điểm M bất kỳ được xác định bởi ba tọa độ r, q , j . Trong đó r là độ dài bán kính vectơ, q là góc giữa trục Oz và, còn góc j là góc giữa trục Ox và tia hình chiếu của trong mặt phẳng xOy.
Biết ba tọa độ cầu của điểm, ta có thể tính được các tọa độ Đề-các của điểm đó theo công thức sau :
x = r.sinq .cosj
y = r.sinq .sinj
z = r.cosq
Trong hệ tọa độ cầu : 0 £ q £ 180o, 0 £ j £ 360o. Các đường tròn ứng cùng một giá trị của q gọi là các đường vĩ tuyến, còn các đường tròn ứng cùng một giá trị của j gọi là các đường kinh tuyến. Hệ tọa độ cầu thuận tiện khi định vị các địa điểm trên quả đất.
Chất điểm và vật rắn :
Để mô tả chuyển động của các vật có kích thước, cần phải biết rõ chuyển động của mọi điểm của vật. Tuy nhiên khi kích thước của vật là bé so với khoảng cách dịch chuyển mà ta xét thì mọi điểm trên vật dịch chuyển gần như nhau thì có thể mô tả chuyển động của vật như chuyển động của một điểm. Khi đó vật được xem là một chất điểm, tức là một điểm hình học nhưng lại có khối lượng bằng khối lượng của vật. Ví dụ khi xét chuyển động của quả đất quanh mặt trời ta xem chuyển động như là chuyển động của chất điểm. Trái lại, khi xét chuyển động tự quay quanh mình của quả đất thì ta không thể xem chuyển động đó là chuyển động của một chất điểm.
Trong nhiều trường hợp, nhờ có khái niệm chất điểm mà việc nghiên cứu chuyển động của các vật trở nên đơn giản hơn rất nhiều.
Phương trình chuyển động và phương trình quĩ đạo:
Phương trình chuyển động :
Để xác định chuyển động của một chất điểm chúng ta cần biết vị trí của chất điểm tại những thời điểm khác nhau. Nói cách khác, chúng ta cần biết sự phụ thuộc theo thời gian của bán kính vectơ của chất điểm :

Phương trình này biểu diễn vị trí của chất điểm theo thời gian và gọi là phương trình chuyển động của chất điểm.
Trong hệ tọa độ Đề-các, phương trình chuyển động của chất điểm là một hệ gồm ba phương trình :
x = x(t);y = y(t) ;z = z(t)(I.1b)
Tương tự, trong hệ tọa độ cầu, phương trình chuyển động của chất điểm là :
r = r(t);q = q (t);j = j (t) (I.1c)
Ví dụ sau là phương trình chuyển động của một chất điểm trong hệ tọa độ Đề-các :
x = Acosw t
y= Asinw t
z= 0
Phương trình quĩ đạo :
Khi chuyển động, các vị trí của chất điểm ở các thời điểm khác nhau vạch ra trong không gian một đường cong liên tục nào đó gọi là quĩ đạo của chuyển động. Phương trình mô tả đường cong quĩ đạo gọi là phương trình quĩ đạo. Trong hệ tọa độ Đề-các phương trình quĩ đạo có dạng :
f(x,y,z) = C (I.2)
trong đó f là một hàm nào đó của các tọa độ x, y, z và C là một hằng số.
Về nguyên tắc, nếu ta biết phương trình chuyển động (I.1) thì bằng các khử tham số t ta có thể tìm được mối liên hệ giữa các tọa độ x, y, z tức là tìm được phương trình quĩ đạo. Vì vậy, đôi khi người ta còn gọi phương trình chuyển động (I.1) là phương trình quĩ đạo cho ở dạng tham số.
Quay trở lại ví dụ về chuyển động của chất điểm cho bởi phương trình :
x = Acosw t
y = Asinw t
z = 0
Ta khử tham số thời gian t bằng cách sau :

Ta suy ra quĩ đạo của chất điểm là một đường tròn bán kính A và tâm nằm ở gốc tọa độ. Đường tròn này nằm ở trong mặt phẳng xOy.
Vận tốc của chuyển động:
Khái niệm vận tốc :
Chuyển động của chất điểm trên quĩ đạo có thể lúc nhanh lúc chậm, do đó để có thể mô tả đầy đủ trạng thái nhanh hay chậm của chuyển động người ta đưa vào một đại lượng vật lý gọi là vận tốc. Trong đời sống hàng ngày chúng ta thường gặp khái niệm vận tốc dưới dạng thuật ngữ tốc độ.
Xét một chuyển động đơn giản là chuyển động thẳng. Giả sử sau khoảng thời gian D t chất điểm đi được một đoạn đường thì theo định nghĩa vận tốc trung bình của chất điểm trên đoạn đường đó là :
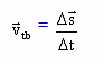
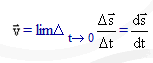
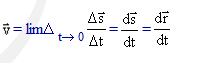
Dĩ nhiên mô tả càng gần đúng vận tốc của chất điểm trên đoạn đường đó nếu càng nhỏ, tức là khi D t càng nhỏ. Khi D t 0 thì tb sẽ tiến tới giới hạn gọi là vận tốc tức thời:
Trong trường hợp tổng quát khi quĩ đạo của chất điểm là một đường cong ta cũng làm tương tự :
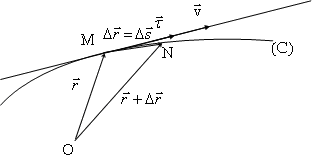
Xét một điểm M bất kỳ trên quĩ đạo (C), lấy một điểm N trên quĩ đạo (C) nằm rất gần M. Gọi là bán kính vectơ xác định vị trí của M, thì +D là bán kính vectơ xác định vị trí của N. Dây cung MN= Dr có thể coi bằng đoạn đường đi được Ds.
Khi tiến đến giới hạn thì :
Từ hình trên ta thấy khi D t 0 thì sẽ dần tới phương tiếp tuyến của quĩ đạo tại điểm đang xét. Vậy vectơ vận tốc luôn hướng theo phương tiếp tuyến của quĩ đạo và có chiều là chiều của chuyển động. Nếu ta gọi là vectơ đơn vị hướng theo phương tiếp tuyến và có chiều là chiều của chuyển động thì ta có thể viết :
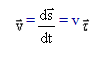
Biểu thức trên cho thấy vectơ vận tốc có độ lớn là v= và có phương và chiều hướng theo vectơ đơn vị.Nói chung, khi chất điểm chuyển động trên quĩ đạo thì vectơ cóthể thay đổi phương nhưng tại mỗi điểm của quĩ đạo thì luôn hướng theo phương tiếp tuyến của quĩ đạo tại điểm đó.
Biểu thức vận tốc trong hệ tọa độ Đề-các :
Vì vận tốc là một vectơ nên ta có thể phân tích thành ba thành phần trên ba trục của hệ tọa độ Đề-các như sau :
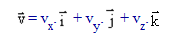
Mặt khác từ (I.3) ta có thể viết như sau :

So sánh với biểu thức ở trên, ta suy ra :
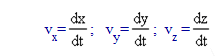
Vậy, trong hệ tọa độ Đề-các, muốn tính thành phần của vận tốc trên một trục nào đó thì ta chỉ việc lấy đạo hàm theo thời gian của thành phần tương ứng của vectơ bán kính.
Độ lớn của vận tốc được xác định bằng hệ thức :
